【ブース】自動運転でより豊かな交通社会に 大前学研究室
六本木・東京ミッドタウンにて開催されている「SFC Open Research Forum 2017」(以下、ORF)では、今年もさまざまな研究室が日頃の研究活動の成果を発表している。大前学研究室(以下、大前研)は、「いつでも」「だれでも」「どこへでも」出かけることができる社会の実現を目指し、自動運転とその関連技術の研究・開発を行っている。今回SFC CLIP編集部は、大前研のブースを取材した。
大前学研究室における"3つの軸"
モータリゼーションが進んだ現代では、自動車はなくてはならないものになっている。その一方で、交通事故の増加や運送需要の増大に対するドライバーの人手不足など、車社会は様々な問題も抱えている。それらを解決する手段として期待されているのが自動運転の技術だ。大前研では、大きく「自動運転」「遠隔操縦」そして「隊列走行」の3つを軸に、新川崎(K²)タウンキャンパスを拠点に研究を展開している。
人の手を借りずに運転 自動運転
自動運転は、人間の助けを借りることなく自動的に車を制御する技術だ。大前研では市販車を使って自動運転の走行試験を行っている。自動運転にもさまざまな種類があり、白線や車間距離をもとに進行方向や速度を制御するだけのものから、信号や障害物、停止線を認識してその場の状況に応じて動くことができるものまである。
大前研の試作車では、進行方向にいる人を認識して回避したり、停車したりする機能も実現している。こうした高いレベルの制御を実現するためには、地図データを正確に参照するために車の現在位置を高精度で認識することが不可欠だ。そこで大前研では、GNSS(全球測位衛星システム)と路面の表面反射率の情報を併用して現在位置を測っているという。

離れたところから車を見守る 遠隔操縦
現在日本国内では、無人の自動運転車を公道で走行させる場合、遠隔操縦ができなければならないと定められている。遠隔操縦では車載機器の情報や映像を操縦者に転送するが、このとき発生する遅延が遠隔操縦の操作性を大きく左右してしまう。
大前研では、車に複数取り付けたカメラの映像を送る際、一般にあまり使われていない周波数帯を用いることで転送時の遅延を減らし、より使いやすい遠隔操縦を実現しているという。また、映像を未加工のまま送るのではなく、3Dデータに変換して容量を削減した上で送信することで、転送の遅延を低減する取り組みも進めている。
複数の車を協調させて制御する 隊列走行
自動運転と遠隔操縦は個々の車に関するものだが、隊列走行の技術は、車同士を通信させて複数の車を一括で制御するものだ。特に人手不足の深刻なトラック業界などから大きな注目を集めている。
隊列走行では車間距離を維持するため、駆動・制動を高精度で制御する必要がある。車間距離が安定しない場合、後ろの車ほど誤差が増幅して加減速を繰り返すことになり、燃費が下がってしまう。隊列を効率的に維持するには高い技術が必要だ。また、隊列の中に一般の車が入った場合にどのように対応するのかなど、運用上の課題も存在する。
大前研では、複数の車を連携して車間距離を保つ技術であるACC(Adaptive Cruise Control)を遠隔操縦に応用。大型車の隊列形成や小型車を高密度で隊列走行させる研究、ACCのパラメータが交通に与える影響についての研究にも取り組んでいる。
ORFでは日頃の研究の成果を紹介
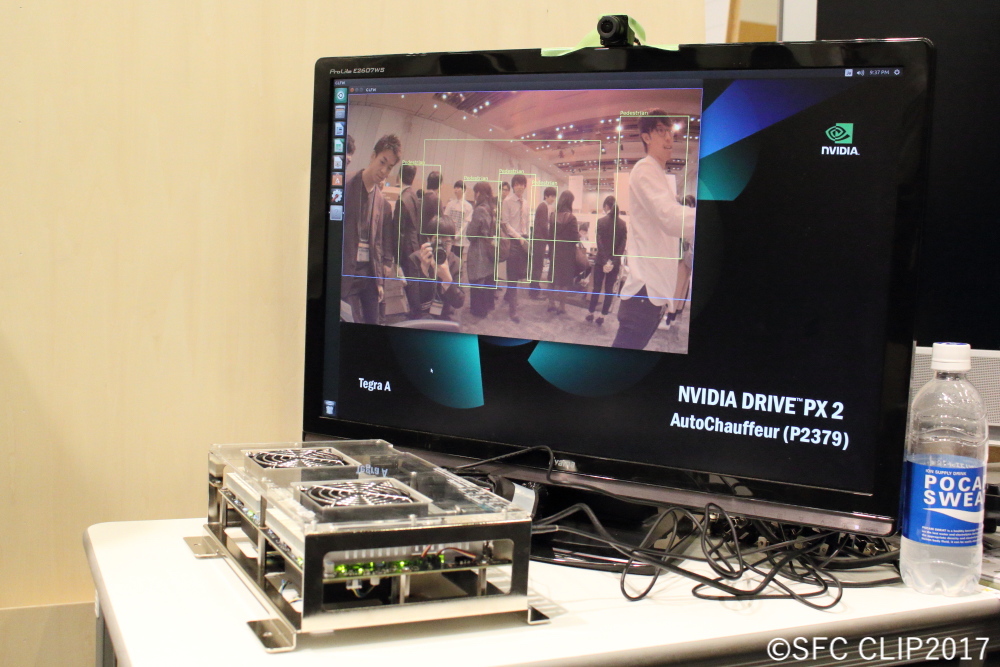
自動運転、遠隔操縦、隊列走行の3つを軸に、安心で快適な交通社会の実現を目指す大前研。実際の研究活動は、この3つの軸から派生し多様な領域へ広がっている。ORF会場では、パネル展示や個人研究の発表のほか、自動運転をしている様子を動画で紹介している。また、ブース内で画像認識を用いて自動車・自転車・歩行者を検出する技術のデモも実施しており、実際に来場者を歩行者として認識している様子を見ることができる。自動運転に関心がある人は、ぜひ大前研のブースに足を運んでみよう。
